WikiDer > Ваймос - Википедия

Ваймос[1] (Voilier Autonome Instrumenté pour Mesures Océanographiques de Surface) является автономное плавание лодка со встроенными приборами для измерения поверхности океана.
Его цель - собрать измерения на поверхности океана. Этот робот - результат сотрудничества между ENSTA Bretagne и ИФРЕМЕР. ENSTA-Bretagne (OSM Team) разрабатывает алгоритмы управления и архитектуру программного обеспечения, IFREMER (LPO + RDT) строит механику, встроенное оборудование.
Брест-Дуарнене. Одно из самых длинных путешествий робота - Брест-Дуарнене.[2] где Ваймос в автономном режиме проехал более 100 км. С тех пор Ваймос совершил поездки протяженностью более 350 км.
В 2013 году Ваймос участвовал в Чемпионат мира по роботизированному парусному спорту (WRSC) 2013 г. в Бресте, Франция [3].
Контроль
Робот следует желаемой траектории, которая представляет собой последовательность линий. При следовании по линии робот имеет два режима.
- то прямой режим: направление, которому необходимо следовать, соответствует направлению ветра, а расстояние между роботом и его линией соответствует ошибке GPS (около 10 метров),
- то режим закрепки: направление, которому нужно следовать, находится в запретная зона и расстояние до линии менее 70 метров.
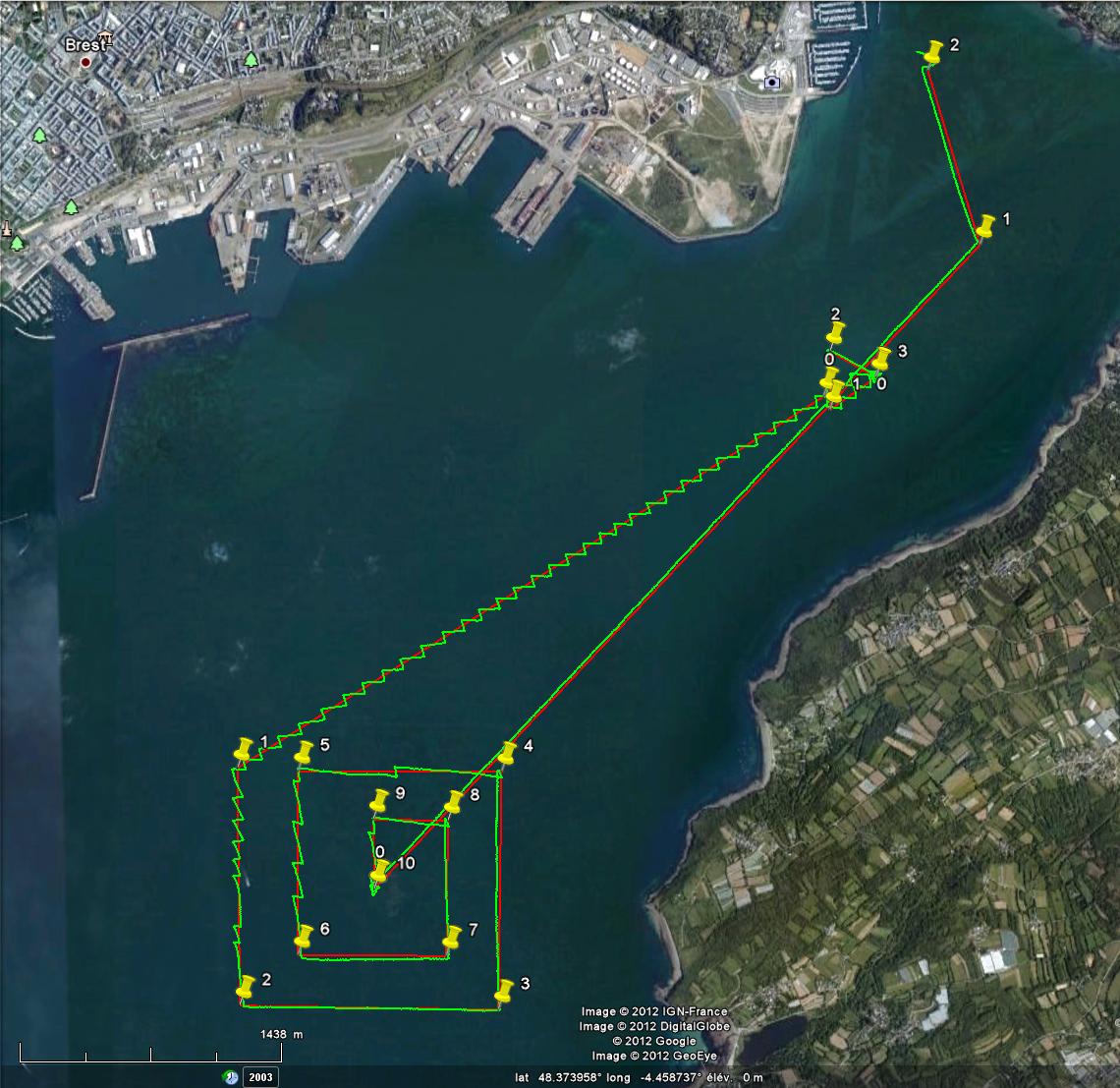
В компьютере Vaimos реализованы два вложенных контура управления. Первый цикл соответствует низкоуровневому контроллеру, который настраивает руль и парус, чтобы иметь желаемый курс. Второй цикл генерирует желаемый заголовок, чтобы сделать линию привлекательной. Благодаря этой стратегии управления с двумя контурами у нас есть гарантия, что робот всегда будет оставаться в требуемом коридоре. Это проиллюстрировано спиральным экспериментом.[4] где робот должен следовать по квадратной спирали[5]. Доказательство того, что робот всегда будет находиться внутри своего коридора, можно выполнить с помощью интервальный анализ и установить инверсию[6]. Доказательство предполагает, что робот подчиняется некоторым неопределенным уравнениям состояния, что не всегда бывает на практике.
Рекомендации
- ^ Ваймос
- ^ Брест-Дуарнене
- ^ Барс, Фабрис Ле; Жаулин, Люк (2014). Роботизированный парусный спорт 2013 (PDF). Дои:10.1007/978-3-319-02276-5. ISBN 978-3-319-02275-8.
- ^ спиральный эксперимент
- ^ Ф. Ле Барс и Л. Джаулин (2012), Экспериментальная проверка надежного контроллера с автономной парусной лодкой Vaimos, В материалах 5-й Международной конференции по роботизированному парусному спорту (Springer Eds.), Кардифф, Англия.
- ^ Л. Жаулин и Ф. Ле Барс (2012), Интервальный подход к анализу устойчивости; Приложение для парусной робототехники, IEEE Transactions on Robotics, volume = 27, issue = 5, "pdf"
{kind=link}
{kind=link}